- ナレッジベース
- 検査・判別・測定用センサ
- HG-C
-
リレー・カプラー
-
コネクタ
-
スイッチ/インプットデバイス
-
ボリューム/エンコーダ
-
制御機器商品全般
-
問合せ窓口
-
ファイバセンサ
-
ビーム(光電)・レーザセンサ
-
フォトマイクロセンサ
-
エリアセンサ
-
ライトカーテン
-
安全機器
-
近接センサ
-
特殊用途センサ
-
圧力センサ・流量センサ
-
検査・判別・測定用センサ
-
静電気対策機器・イオナイザ
-
センサ周辺機器
-
IoT関連ユニット・省配線システム
-
レーザマーカ
-
コードリーダ
-
PLC
-
表示器
-
省エネ支援機器
-
タイマ・カウンタ・コンポ
-
画像センサ・画像処理機
-
UV照射器
-
サーボモータ・アンプ
-
小形ギヤードモータ(受注終了品)
-
ブラシレスモータ アンプ(受注終了品)
-
インバータ
HG-C1100L3-PのSD(サービスデータ)を読み 出ししたい。読み出し方法は?
HG-C1100L3-PのSD(サービスデータ)を読み出ししたい。 読み出し方法は?
ここでは、具体的に例を挙げて説明いたします。
HG-C1100L3-Pの投光停止状態を、IO-Link専用読み出し命令(GP-RIRD)を使用して、
プログラム実行により実施する方法を解説します。
読み出しの前に、読み出し情報をIO-Link専用書き込み命令(GP-RIWT)を使用して、
書き込む必要があります。
投光停止状態の読み出しは、インデックス(70:DEC)、サブインデッス(0:DEC)を
使用します。
設定データは、0:投光、1:投光停止となります。




(注1):プログラムは、あくまでも、参考例です。
動作検証をお客様で実施いただき、使用可否をご判断願います。
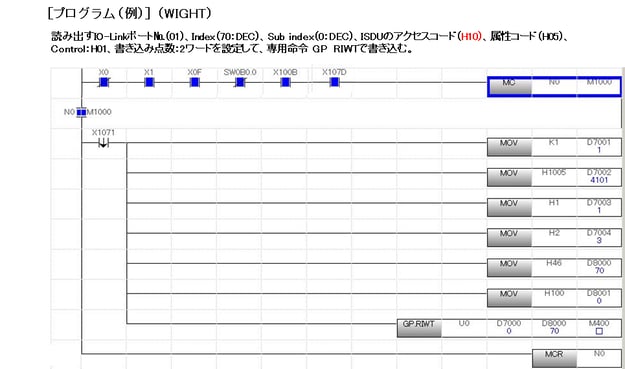
・下記、条件が揃った時に、MC NO M 1000 命令が実行される。

・X0:OFF (RJ71GF11-T2がユニット異常ではない。)
・X1:ON (自局(RJ71GF11-T2)データリンク状態がデータリンク中)
・X0F:ON (ユニット(RJ71GF11-T2) READ状態)
・SW0B0.0:OFF (局番1のユニット(SC-LG2-CEF-P)のデータリンク状態が正常)
・X100B:ON (SC-LG2-CEF-Pがリモートレデ゙ィ状態にある。)
・X107D (RIWT/RIRD切換用センサ(X107D)がON)の時、MC NO M 1000
が実行される。)

・MC N0 M 1000(マスターコントロール)命令が実行されるとラダーが接続され、MCR(マスターコントロールリセット)までの命令が実行される。
・起動用接点がON ⇒ OFFになると、MOVE命令が実行される。

・D7001 ~ D7004にコントロールデータを収納する。
・D7001:K1 ⇒ S1+1 対象局番号 (SC-LG2-CEF-Pの局番:1)
・D7002:H1005 ⇒ S1+2 アクセスコード/属性コード
(ISDUのアクセスコードはH10、属性コードは
H05:固定)
・D7003:H1 ⇒ S1+3 デバイス番号 (IO-Link ポート1のみ)
・D7004:H2 ⇒ S1+4 書き込み点数
(書き込みデータは、D8000 ~ D8001の2ワード)

・D8000 ~ D8001に書き込みデータを収納する。
・D8000:H46 ⇒ S2+0 Index(上位バイト)/ Index(下位バイト)
(投光停止状態 Index:70(DEC) ⇒ 46(HEX)
・D8001:H100 ⇒ S2+1 Control H01
( 読み出し対象データを設定する場合のControlは、
H01を使用する。)/投光停止状態 Sub Index 0(HEX)



・GP RIWT命令が実行される。
・U0:先頭入出力№0のマスタ・ローカルユニットを指定
・S1=D7000:コントロールデータを格納している先頭アドレス
・S2=D8000:書き込むデータを格納している先頭アドレス
・d=M400:命令完了にて、1スキャンONさせる自局の先頭デバイス



・下記、条件が揃った時に、MC NO M 1100 命令が実行される。
・X0:OFF (RJ71GF11-T2がユニット異常ではない。)
・X1:ON (自局(RJ71GF11-T2)データリンク状態がデータリンク中)
・X0F:ON (ユニット(RJ71GF11-T2) READ状態)
・SW0B0.0:OFF (局番1のユニット(SC-LG2-CEF-P)のデータリンク状態が正常)
・X100B:ON (SC-LG2-CEF-Pがリモートレデ゙ィ状態にある。)
・X107D (RIWT/RIRD切換用センサ(X107D)がOFF)の時、MC NO M 1100
が実行される。)

・MC N0 M 1100(マスターコントロール)命令が実行されるとラダーが接続され、MCR(マスターコントロールリセット)までの
命令が実行される。
・起動用接点がON ⇒ OFFになると、MOVE命令が実行される。

・D7001 ~ D7003に読み出しデータを収納する。
・D7001:K1 ⇒ S1+1 対象局番号 (SC-LG2-CEF-Pの局番:1)
・D7002:H1005 ⇒ S1+2 アクセスコード/属性コード
(ISDUのアクセスコードはH10、属性コードは
H05:固定)
・D7003:H1 ⇒ S1+3 デバイス番号 (IO-Link ポート1のみ)
・D7004:H3 ⇒ S1+4 読み込み点数


・GP RIRD命令が実行される。
・U0:先頭入出力№0のマスタ・ローカルユニットを指定
・S1=D7000:コントロールデータを格納している先頭アドレス
・S2=D8000:読み込むデータを格納している先頭アドレス
・d=M500:命令完了にて、1スキャンONさせる自局の先頭デバイス


