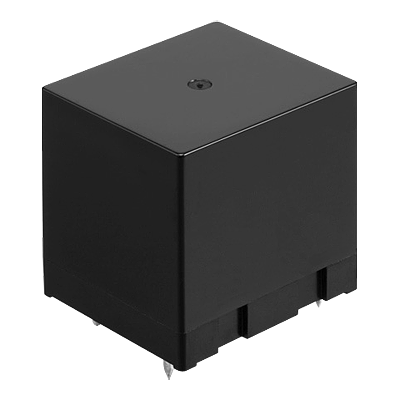
リレー・カプラー
メカニカルリレー、ソリッドステートリレー、PhotoMOSリレー、その他リレー全般の情報
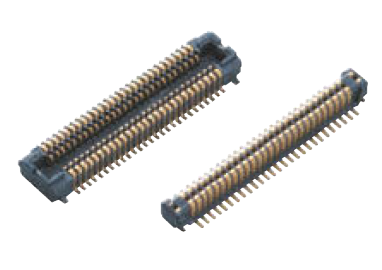
コネクタ
基板用コネクタ、FPC用コネクタ、光アクティブコネクタ(AOC)等の情報
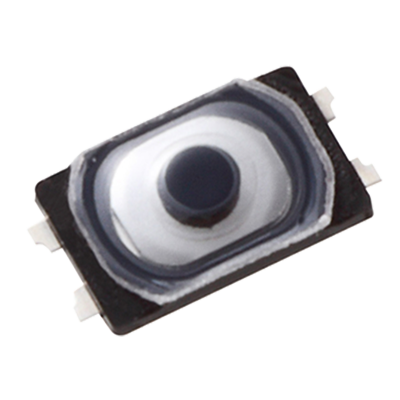
スイッチ/インプットデバイス
ターコイズスイッチ、タクタイルスイッチ、操作用スナップスイッチなどの情報

ボリューム/エンコーダ
機器用ボリューム、エンコーダの情報

制御機器商品全般
制御機器商品全般、ウエブサイト、海外安全規格、制御機器会員に関する情報
